تتقدم تقنيات الذكاء الاصطناعي، وخاصة نماذج الانتشار مثل DALL-E من OpenAI، بشكل ملحوظ في مساعدة العلماء على تصميم الروبوتات. فقد أظهرت الأبحاث الأخيرة من مختبر علوم الحاسوب والذكاء الاصطناعي بجامعة MIT كيف يمكن للذكاء الاصطناعي تحسين تصميم الروبوتات بحيث تقفز أعلى وتهبط بأمان.
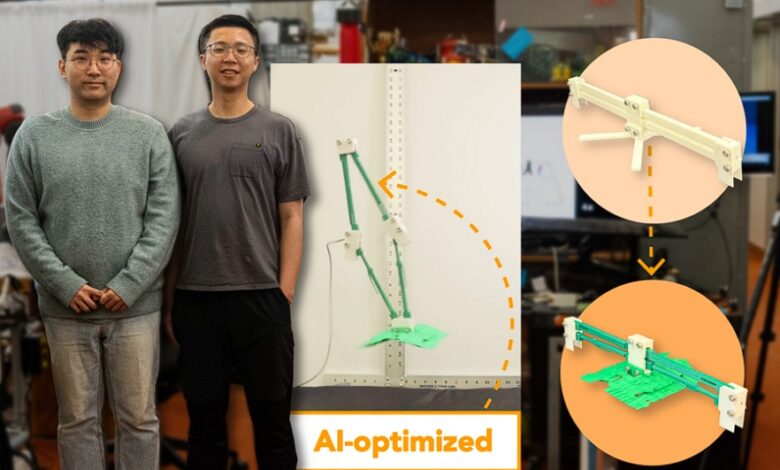
يمكن للمستخدمين إنشاء نموذج ثلاثي الأبعاد لروبوت وتحديد الأجزاء التي يرغبون في تعديلها. يقوم الذكاء الاصطناعي بعد ذلك بتوليد الشكل الأمثل لتلك الأجزاء واختبارها في محاكاة قبل تصنيعها. باستخدام هذه التقنية، تمكن الباحثون من تطوير روبوت يقفز بمعدل يصل إلى حوالي قدمين، أي بنسبة 41% أعلى مقارنةً بالروبوتات التقليدية.
الفرق الرئيسي في التصميم كان في كيفية ارتباط الأجزاء ببعضها. فبينما كانت الروبوتات التقليدية تحتوي على روابط مستقيمة، استخدم الذكاء الاصطناعي روابط منحنية، مما ساعد الروبوت على تخزين المزيد من الطاقة قبل القفز.
كما استخدم الباحثون نماذج الانتشار لاختيار أفضل تصميمات الروبوت من بين 500 تصميم محتمل، مما أتاح لهم تحسين التصميمات بشكل تدريجي. وعند الانتهاء، وجد الفريق أن الروبوت المصمم بواسطة الذكاء الاصطناعي هبط بشكل أكثر أمانًا، مع تحسين بنسبة 84% في معدل الهبوط.
تشير هذه النتائج إلى أن نماذج الذكاء الاصطناعي يمكن أن تكون مفيدة في تحسين تصميمات الروبوتات، ليس فقط للقفز، بل أيضًا في مجالات أخرى مثل تصنيع الروبوتات المنزلية.
يسعى الفريق إلى توسعة أهدافهم، بحيث يمكن استخدام الذكاء الاصطناعي في تصميم روبوتات قادرة على القيام بمهام محددة مثل رفع الأغراض أو استخدام الأدوات الكهربائية.
هذا المحتوى تم باستخدام أدوات الذكاء الاصطناعي.